@article{naylor2025,author={Naylor, Jack and Mishra, Raghav and Barbara, Nicholas and Dansereau, Donald G.},title={$\partial${LITE}: Differentiable Lighting-Informed Trajectory Evaluation for On-Orbit Inspection},journal={IAF 76th International Astronautical Congress (IAC) Space Operations Symposium},organization={International Astronautical Federation},year={2025},video={https://appearance-aware.github.io/dlite/static/videos/dlite_final_presentation.mp4},}
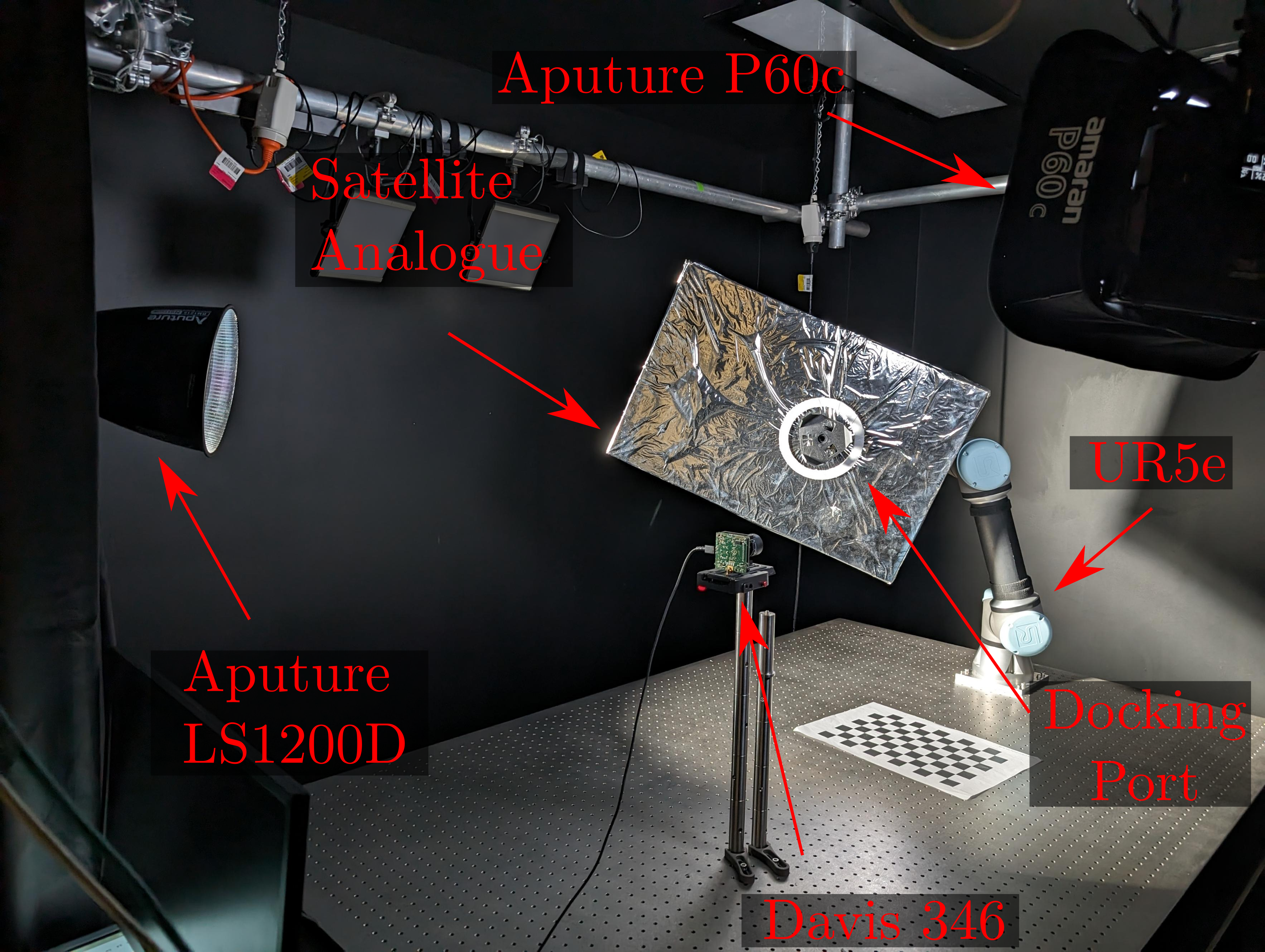
Mixing Data-driven and Geometric Models for Satellite Docking Port State Estimation using an RGB or Event Camera
Cedric Le Gentil, Jack Naylor, Nuwan Munasinghe, Jasprabhjit Mehami, Benny Dai, Mikhail Asavkin, Donald G Dansereau, and Teresa Vidal-Calleja
2025 International Conference on Robotics and Automation (ICRA) 2025
@article{gentil2025mixing,title={Mixing Data-driven and Geometric Models for Satellite Docking Port State Estimation using an RGB or Event Camera},author={Gentil, Cedric Le and Naylor, Jack and Munasinghe, Nuwan and Mehami, Jasprabhjit and Dai, Benny and Asavkin, Mikhail and Dansereau, Donald G and Vidal-Calleja, Teresa},journal={2025 International Conference on Robotics and Automation (ICRA)},year={2025},organization={IEEE},}
@article{naylor2024surf,title={{Surf-NeRF}: Surface Regularised Neural Radiance Fields},author={Naylor, Jack and Ila, Viorela and Dansereau, Donald G.},journal={arXiv preprint arXiv:2411.18652},year={2024},}
Appearance-aware Trajectory Optimisation for Autonomous On-Orbit Inspection
Raghav Mishra, Jack Naylor, Nicholas H Barbara, and Donald G Dansereau
International Symposium on
Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS) 2024
@article{mishra2024apaware,author={Mishra, Raghav and Naylor, Jack and Barbara, Nicholas H and Dansereau, Donald G},title={Appearance-aware Trajectory Optimisation for Autonomous On-Orbit Inspection},journal={International Symposium on
Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS)},year={2024},}
Adaptive Keyframe Selection for Online Iterative NeRF Construction
Joshua Wilkinson, Jack Naylor, Ryan Griffiths, and Donald G Dansereau
In RoboNerF: 1st Workshop On Neural Fields In Robotics at ICRA 2024 2024
@inproceedings{wilkinson2024adaptive,title={Adaptive Keyframe Selection for Online Iterative NeRF Construction},author={Wilkinson, Joshua and Naylor, Jack and Griffiths, Ryan and Dansereau, Donald G},booktitle={RoboNerF: 1st Workshop On Neural Fields In Robotics at ICRA 2024},year={2024},}
Towards Event-Based Satellite Docking: A Photometrically Accurate Low-Earth Orbit Hardware Simulation
Nuwan Munasinghe, Cedric Le Gentil, Jack Naylor, Mikhail Asavkin, Donald G Dansereau, and Teresa Vidal-Calleja
@inproceedings{munasinghe2024towards,title={Towards Event-Based Satellite Docking: A Photometrically Accurate Low-Earth Orbit Hardware Simulation},author={Munasinghe, Nuwan and Le Gentil, Cedric and Naylor, Jack and Asavkin, Mikhail and Dansereau, Donald G and Vidal-Calleja, Teresa},booktitle={HERMES2 Workshop at ICRA2024},year={2024},}
2023
NOCaL: Calibration-Free Semi-Supervised Learning of Odometry and Camera Intrinsics
Ryan Griffiths, Jack Naylor, and Donald G. Dansereau
In 2023 IEEE International Conference on Robotics and Automation (ICRA) 2023
@inproceedings{griffiths2022nocal,author={Griffiths, Ryan and Naylor, Jack and Dansereau, Donald G.},title={NOCaL: Calibration-Free Semi-Supervised Learning of Odometry and Camera Intrinsics},booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},pages={4056--4062},year={2023},organization={IEEE},}