A 3D Hyperspectral Camera
Development of a hyperspectral camera fused with depth.
This was a 6-month long project I undertook at the Australian Centre for Field Robotics starting as a winter research project and continuing as a research project for a physics unit I took.
This project aimed, and eventually successfully produced both an open source-able hyperspectral attachment which produced hyperspectral cubes of 2nm resolution. This was then fused with a Gaussian smoothed depth map of the scene to produce an aligned RGB++D cube (a unique hyperspectral equivalent of RGBD).
You can see below some advanced images from the refined prototype - a marked increase in image quality.
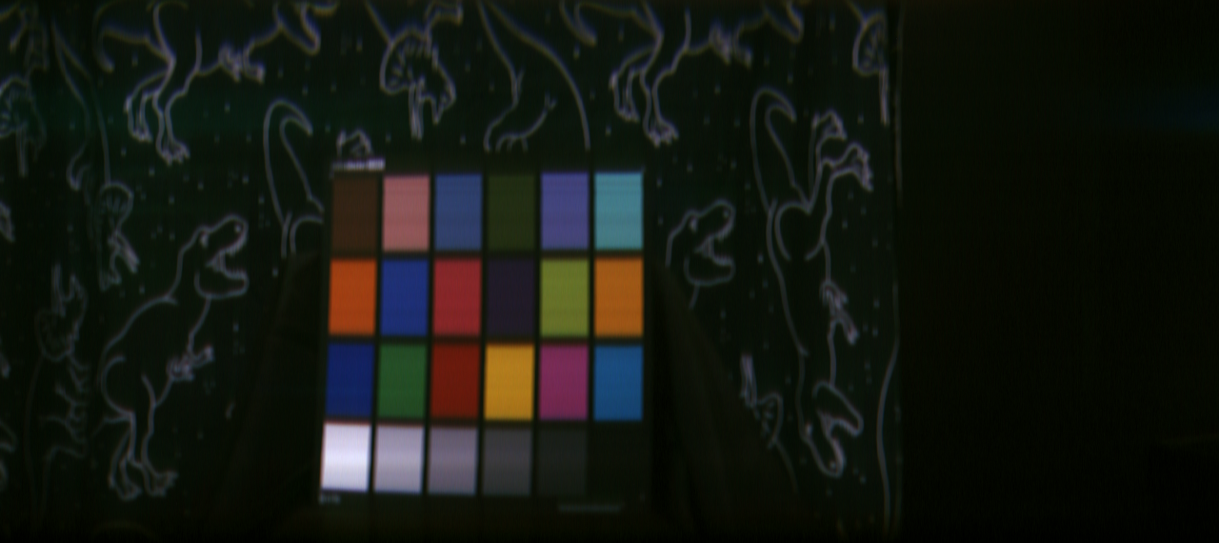
Fig. RGB Reconstructed from hyperspectral scans
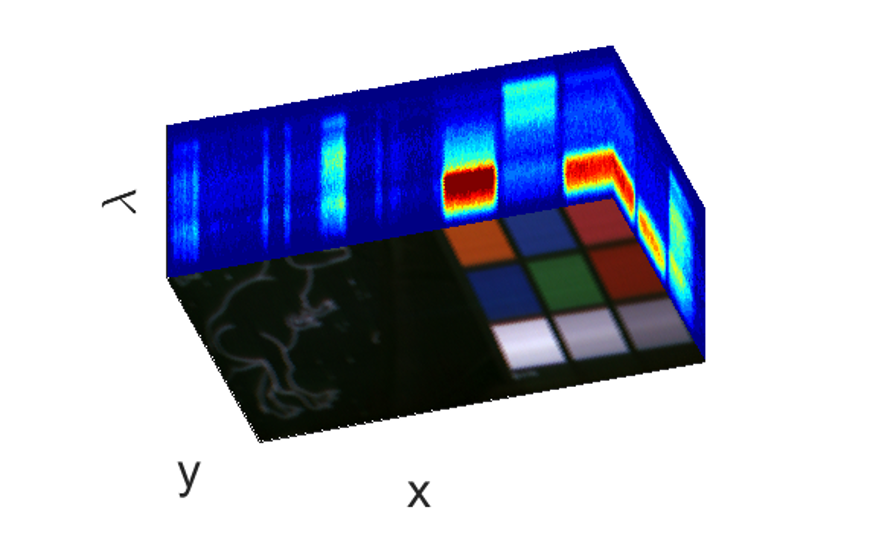
Fig. Example showing the 3D spectral data in the form of a hyperspectral cube
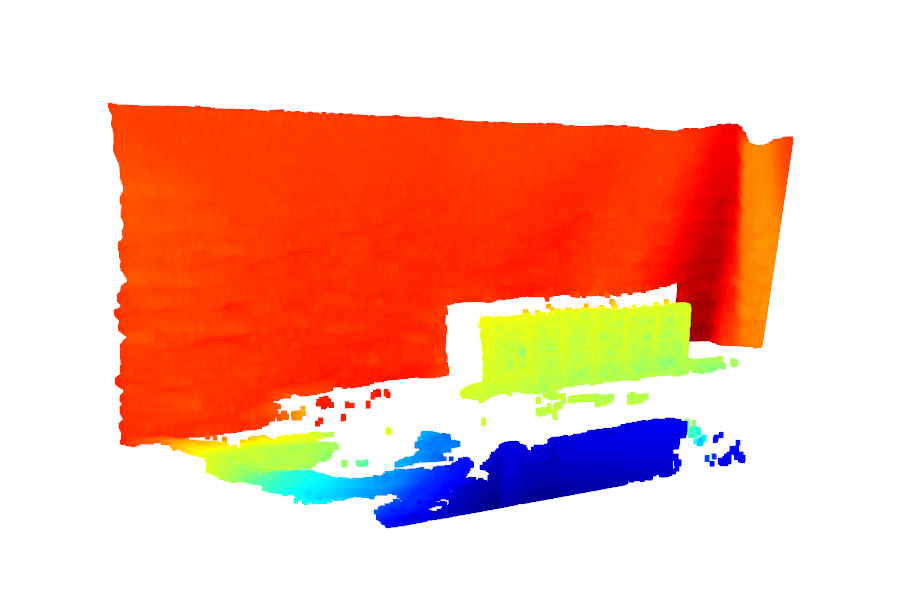
Fig. A point cloud projected from a Guassian smoothed depth map

Fig. Aligned hyperspectral and depth data projected into pointcloud